
Georg Krispel
PhD CandidateComputer Vision | 3D Perception
Institute of Visual Computing
Graz University of Technology
Graz | Europe | Remote
GitHub
Google Scholar
Publications
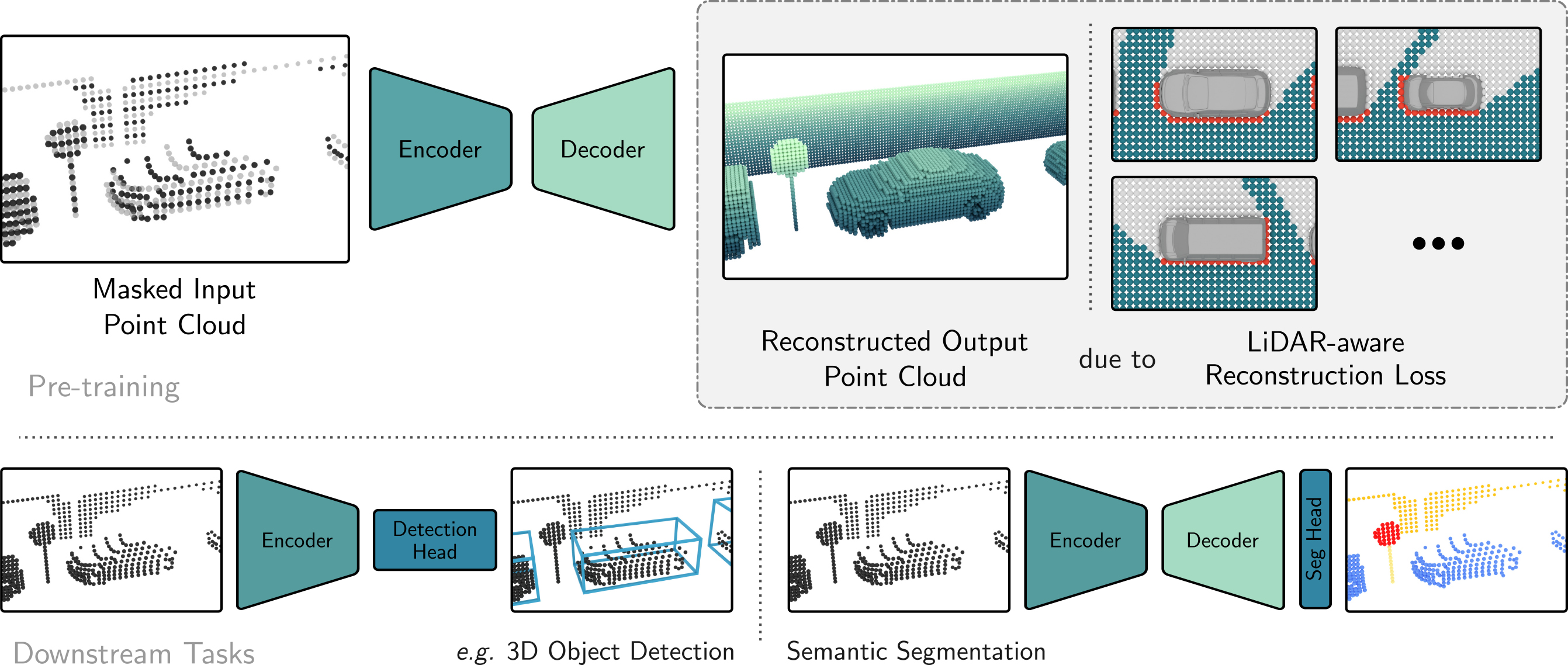
MAELi: Masked Autoencoder for Large-Scale LiDAR Point Clouds
Georg Krispel, David Schinagl, Christian Fruhwirth-Reisinger, Horst Possegger and Horst Bischof
Winter Conference on Applications of Computer Vision (WACV), 2024
Paper
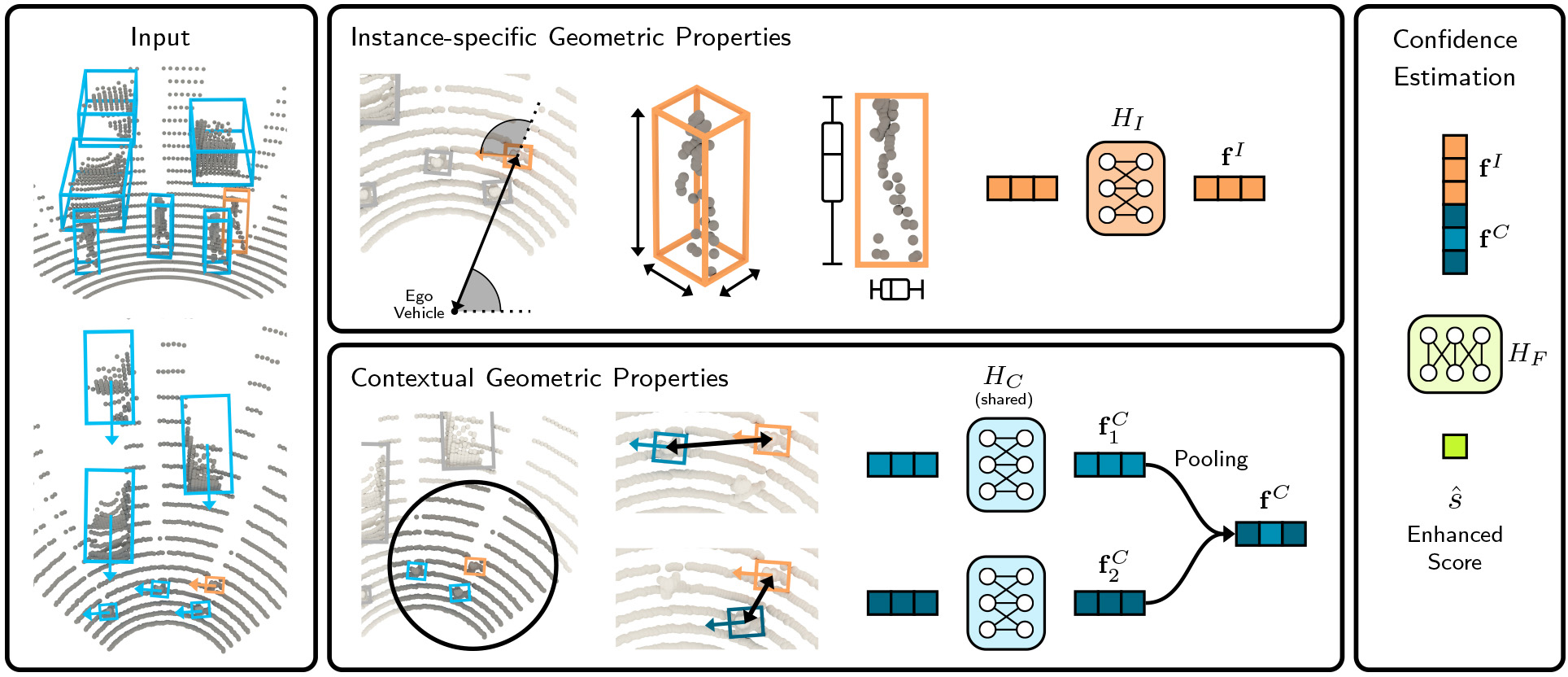
GACE: Geometry Aware Confidence Enhancement for Black-box 3D Object Detectors on LiDAR-Data
David Schinagl, Georg Krispel, Christian Fruhwirth-Reisinger, Horst Possegger and Horst Bischof
International Conference on Computer Vision (ICCV), 2023
Paper
Code
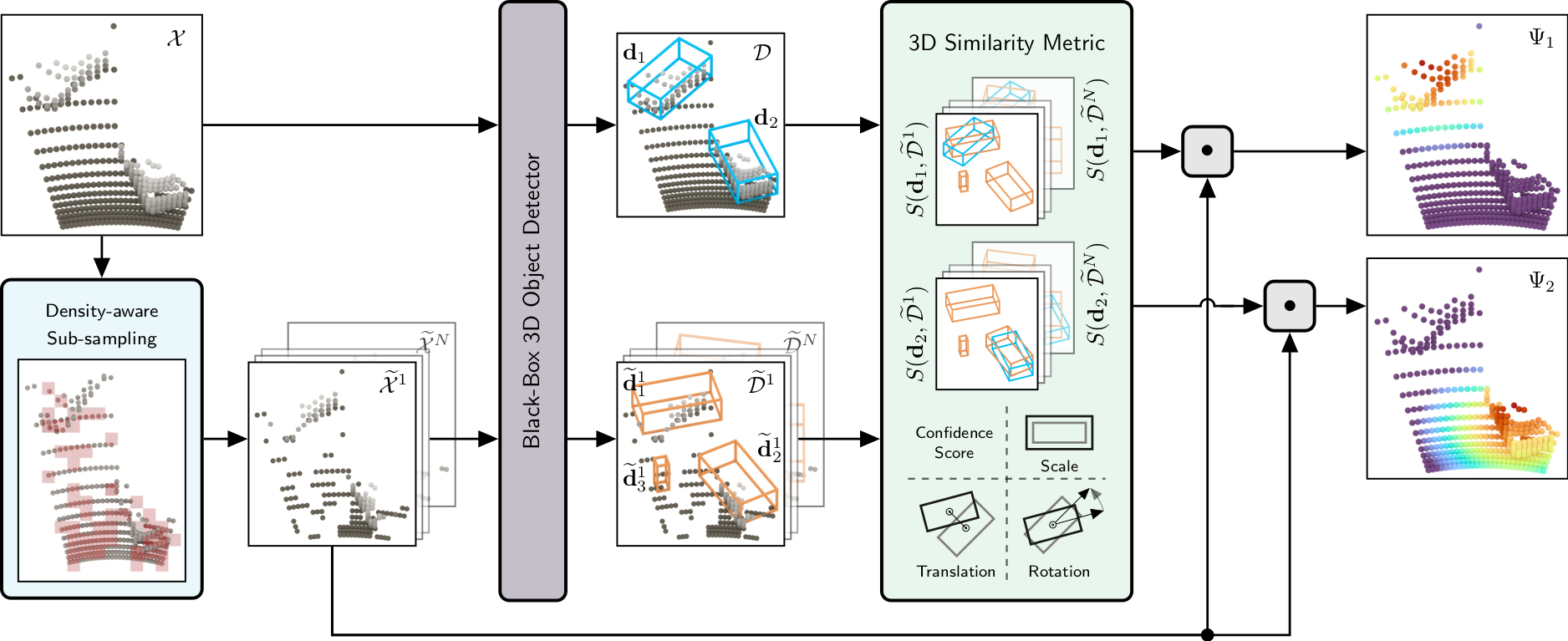
OccAM’s Laser: Occlusion-based Attribution Maps for 3D Object Detectors on LiDAR Data
David Schinagl, Georg Krispel, Horst Possegger, Peter M. Roth and Horst Bischof
Conference on Computer Vision and Pattern Recognition (CVPR), 2022
Paper
Code
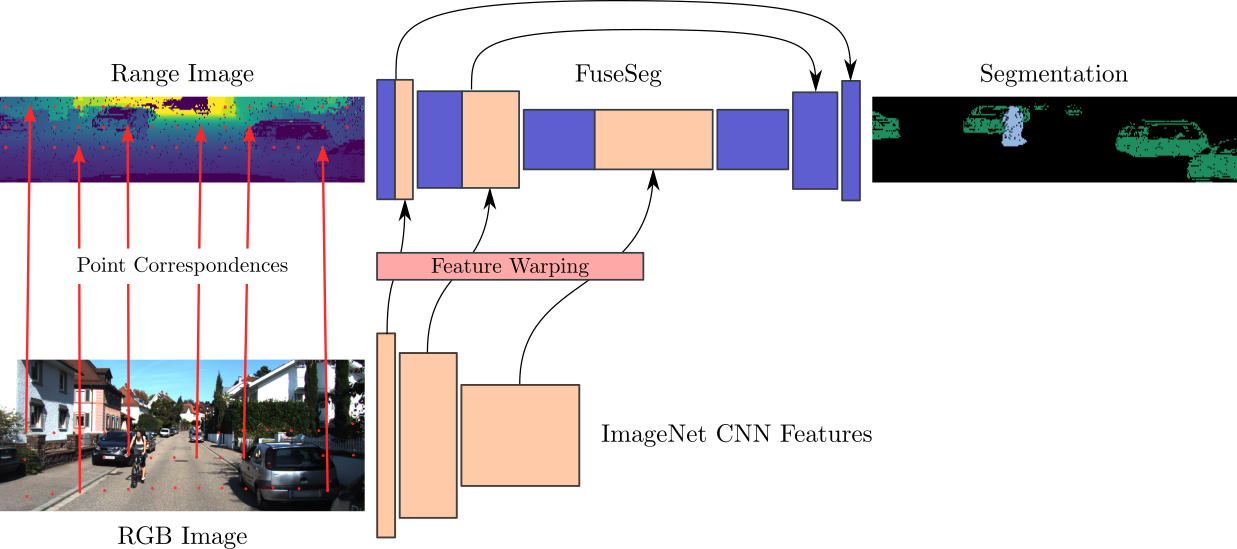
FuseSeg: LiDAR Point Cloud Segmentation Fusing Multi-Modal Data
Georg Krispel, Michael Opitz, Georg Waltner, Horst Possegger and Horst Bischof
Conference on Applications of Computer Vision (WACV), 2020
Paper
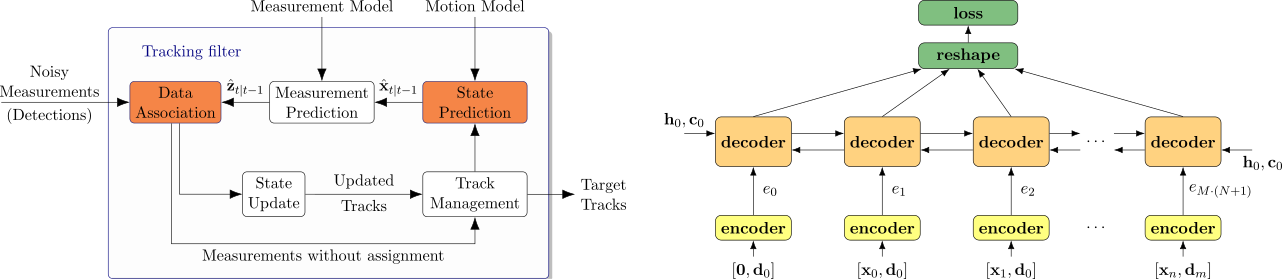
Towards Data-driven Multi-target Tracking for Autonomous Driving
Christian Fruhwirth-Reisinger, Georg Krispel, Horst Possegger and Horst Bischof
Computer Vision Winter Workshop (CVWW), 2020
Paper
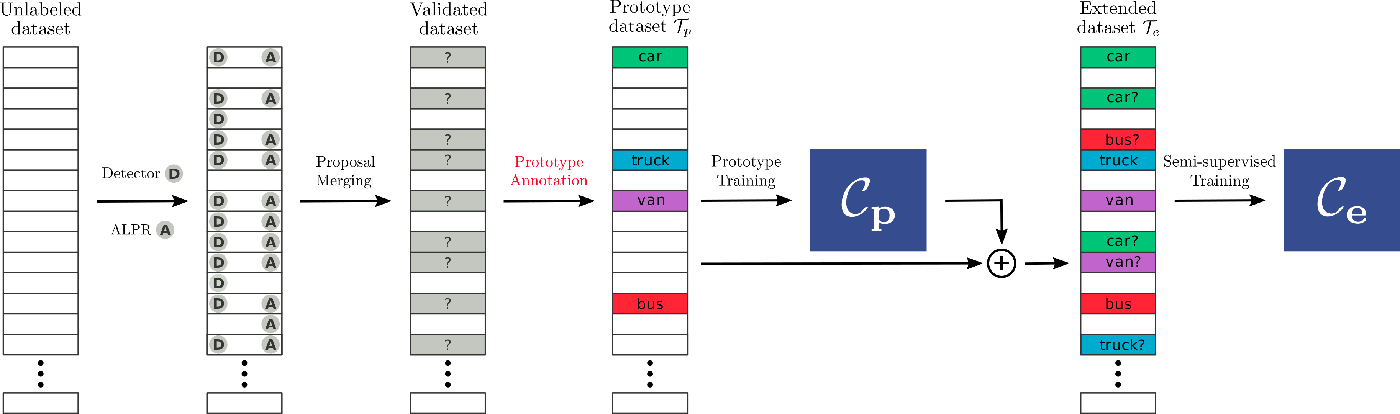
Semi-supervised Detector Training with Prototypes for Vehicle Detection
Georg Waltner, Michael Opitz, Georg Krispel, Horst Possegger and Horst Bischof
Intelligent Transportation Systems Conference (ITSC), 2019
Paper